Keywords
vehicle detection
improved YOLOv8
vehicle positioning
How to Cite




Abstract
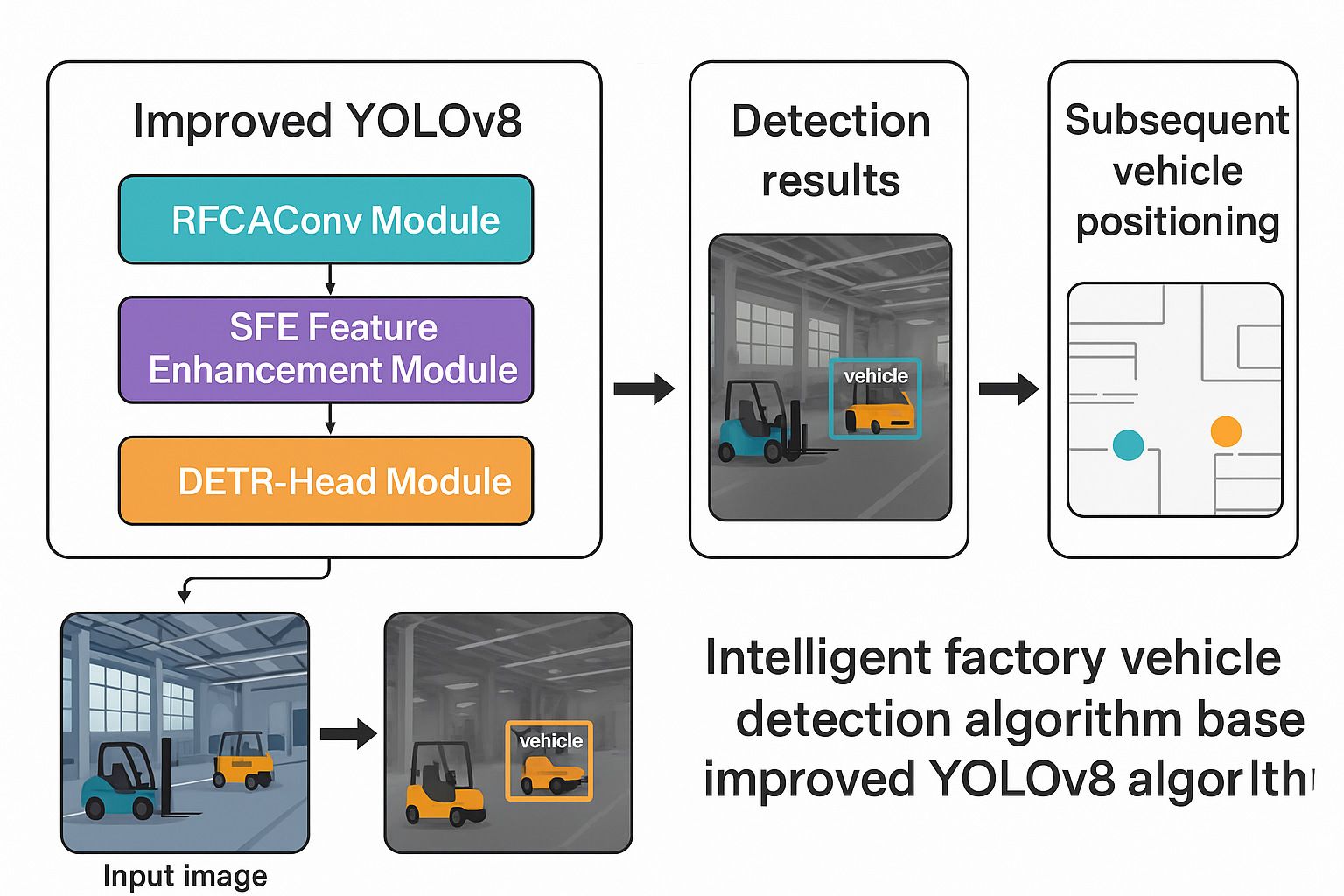
Aiming at the problem that the existing algorithms for vehicle detection in smart factories are difficult to detect partial occlusion of vehicles, vulnerable to background interference, lack of global vision, and excessive suppression of real targets, which ultimately cause accuracy degradation. At the same time, in order to facilitate the subsequent positioning of vehicles in the factory, this paper proposes an improved YOLOv8 algorithm. Firstly, the Receptive-Field Coordinated Attention Convolutional(RFCAConv) is combined to improve the original YOLOv8 backbone. Pay attention to the different features in the receptive field, and give priority to the spatial features of the receptive field to capture more vehicle feature information and solve the problem that the vehicle is partially occluded and difficult to detect. Secondly, the Scattering Feature Enhancement(SFE) module is added to the neck of v8, which improves the saliency of the target in the reasoning process and reduces the influence of background interference on vehicle detection. Finally, the head of the RT-DETR algorithm is used to replace the head in the original YOLOv8 algorithm, which avoids the excessive suppression of the real target while combining the context information. The experimental results show that compared with the original YOLOv8 algorithm, the detection accuracy of the improved YOLOv8 algorithm is improved by 4.6% on the self-made smart factory data set, and the detection speed also meets the real-time requirements of smart factory vehicle detection and subsequent vehicle positioning.

This work is licensed under a Creative Commons Attribution 4.0 International License.
Copyright (c) 2025 Qiannian Miao, Tianhu Wang, Rong Wang
Downloads
Publication Facts
Reviewer profiles N/A
Author statements
- Editor & editorial board
- profiles
- Academic society
- China Instrument and Control Society
- Publisher
- China Instrument and Control Society

To learn about these publication facts, click ![]()
PF is maintained by the Public Knowledge Project